Desarrolle aplicaciones autónomas, desde la percepción hasta el movimiento, y optimice el comportamiento en el nivel de sistema
Investigadores e ingenieros de robótica utilizan MATLAB y Simulink para diseñar, simular y verificar todos los aspectos de los sistemas autónomos, desde la percepción hasta el movimiento.
Beneficios:
Modele sistemas robóticos hasta el último detalle, como el ruido de sensores y la vibración del motor.
Simule sistemas robóticos con cinemática, dinámica y propiedades de contacto precisas.
Diseñe y optimice tanto la autonomía de alto nivel como el control de bajo nivel.
Sintetice y analice datos de sensores con una librería de algoritmos que se mantiene actualizada.
Verifique el diseño o los algoritmos del robot de forma gradual, desde la simulación hasta las pruebas de hardware-in-the-loop (HIL).
Despliegue algoritmos en robots a través de ROS o directamente en microcontroladores, FPGA, PLC y GPU.
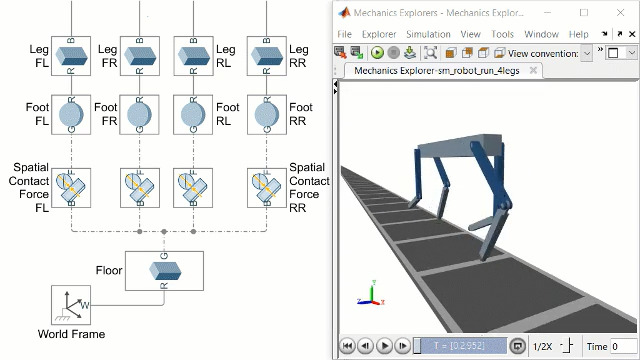
Diseño de la plataforma de hardware
Cree un modelo físico 3D o un modelo electromecánico de vehículos autónomos, drones y manipuladores, para simulación, optimización y reinforcement learning de algoritmos de control.
➔ Importe modelos 3D existentes desde archivos URDF o software CAD. ➔ Implemente dinámica, contactos, hidráulica y neumática para crear un modelo físicamente preciso ➔Complete los gemelos digitales agregando una capa de diagrama eléctrico
Procesamiento de datos de sensores
Implemente algoritmos de procesamiento de datos de sensores con las potentes toolboxes de MATLAB y Simulink.
➔ Conecte con sensores a través de ROS, serie y otros protocolos.
➔ Visualice datos de cámaras, sonar, LiDAR, GPS e IMU. Automatice tareas de procesamiento de sensores frecuentes, tales como fusión, filtrado, transformación geométrica, segmentación y registro de sensores.
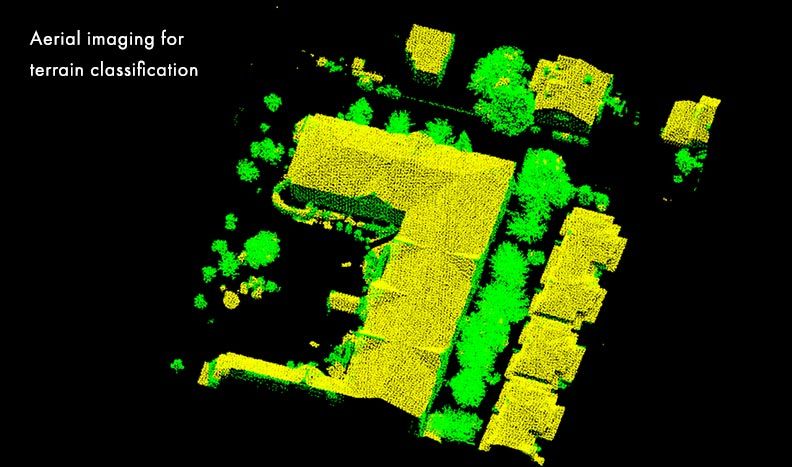
Percepción del entorno
Utilice las apps interactivas integradas de MATLAB para implementar algoritmos para la detección y el seguimiento de objetos, la localización y el mapeo.
➔ Experimente y evalúe diferentes redes neuronales para la clasificación de imágenes, la regresión y la detección de características.
➔ Convierta algoritmos automáticamente a código C/C++, punto fijo, HDL o CUDA® para su despliegue en hardware.
➔ Planificación y toma de decisiones
Vant
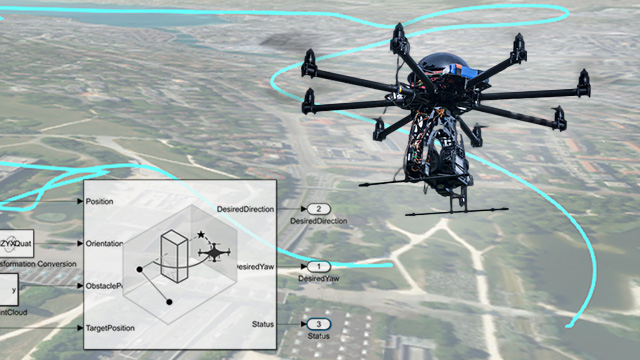
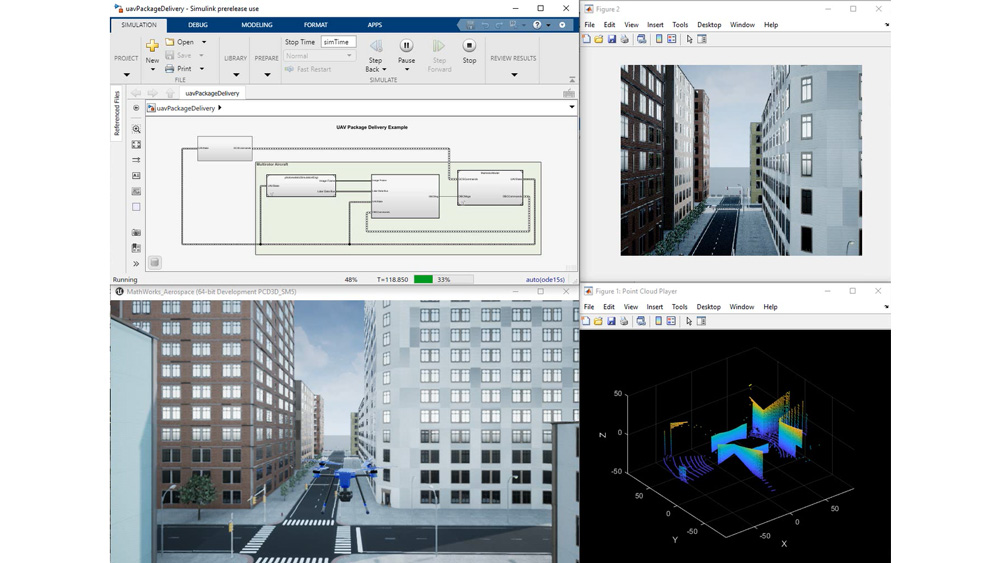
MATLAB y Simulink para vehículos aéreos no tripulados
Desarrollo de plataformas de VANT:
Modele y analice arquitecturas de sistemas de VANT a la vez que enlaza con los requisitos. Diseñe y pruebe algoritmos de control de vuelo con modelos de planta en simulación sin hardware y reducir el riesgo antes de las pruebas de vuelo. Realice evaluaciones iniciales del plan de movimiento.
Percepción y localización:
Trabaje con algoritmos y modelos de sensores para detección, mapeo y localización. Simule lecturas de IMU y GPS para diseñar algoritmos de fusión y localización del VANT. Utilice Deep Learning y Machine Learning para desarrollar algoritmos de detección de objetos y personas.
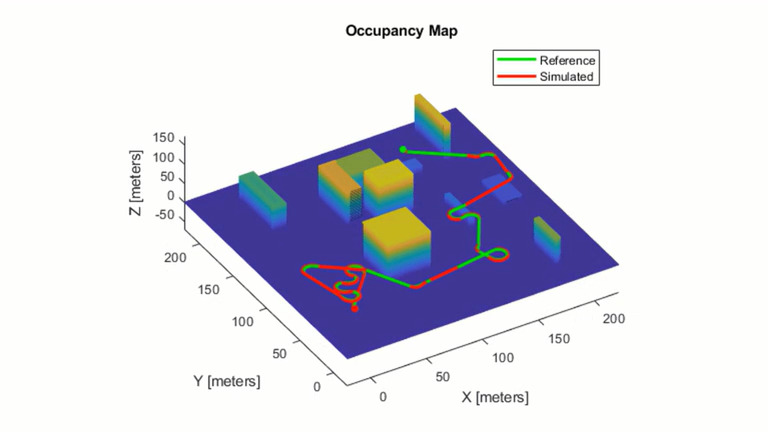
Planificación y control del movimiento:
Trabajé con MATLAB y Simulink para crear misiones de VANT y planificar trayectorias complejas utilizando algoritmos predefinidos y librerías de bloque y realice evaluaciones iniciales del plan de movimiento de un VANT con las funcionalidades de animación integradas
Pruebas basadas en simulación:
Detecte errores de diseño en pruebas de simulación virtual, reduzca el riesgo y el coste de las pruebas de vuelo con hardware. Integre modelos de planta de VANT, sistemas de control de vuelo y algoritmos de vuelo autónomo en MATLAB y Simulink.